
政府からの100万ドルの研究助成金がなくても、わずか数千ドルと確かな技術力があれば本格的なロボティクスプロジェクトが可能だ。スタンフォードの学生たちはDoggoと名付けた四足ロボットでそれを証明した。その最大の特徴は、一般市販の部品だけでできること。もちろん肘や膝などの関節部分には、大量のグリースが要るけど。
ロボットとオートメーションに関するIEEEの国際会議でプレゼンするために作ったDoggoは、Stanford Robotics ClubのExtreme Mobilityチームの作品だ(彼らのペーパーがここにある)。その目的は、ほかの人たちでも作れるような現代的な四足ロボットを最小の費用と最少のパーツで作ることだ。
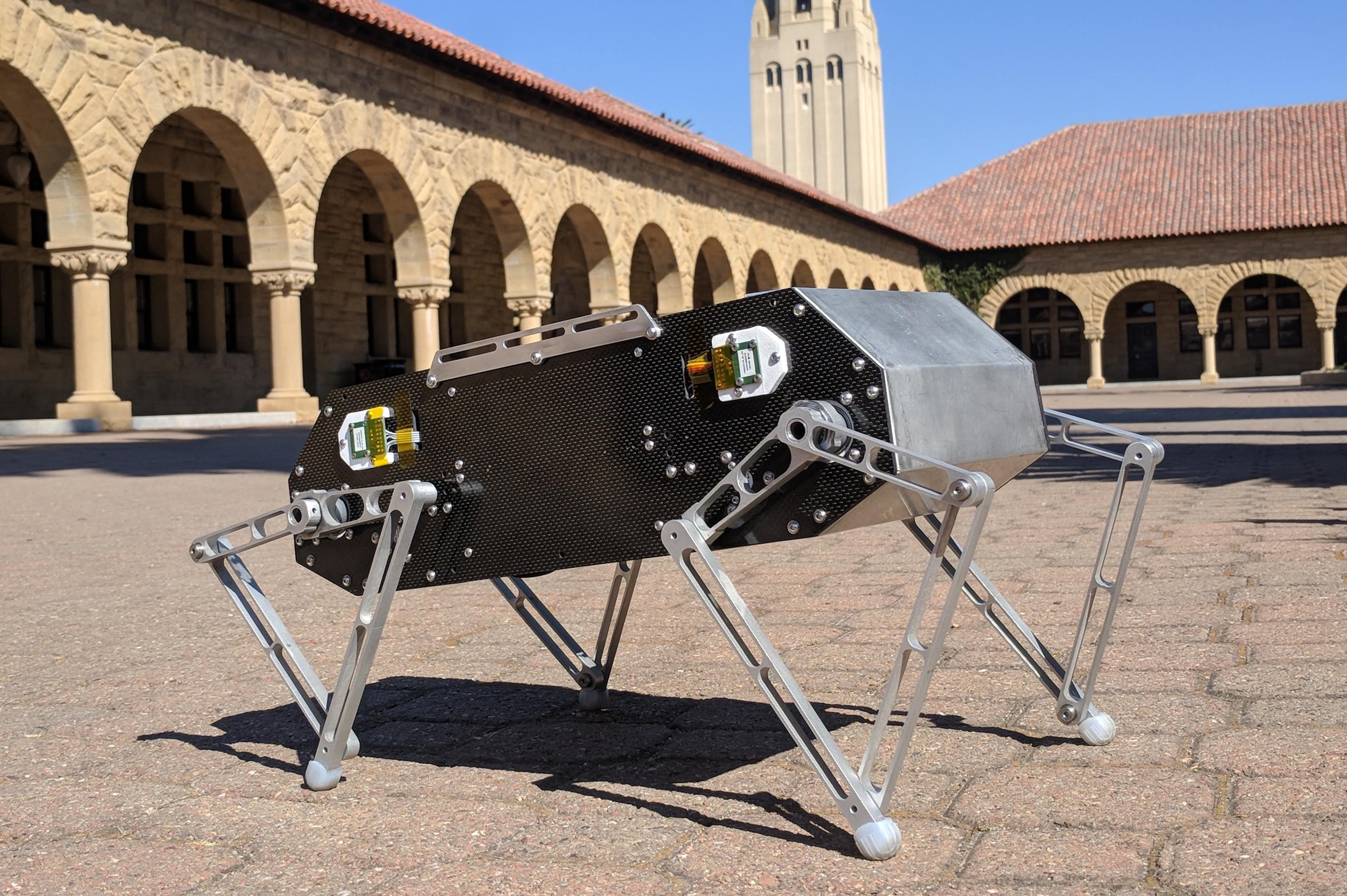
このかわいいロボットは、一見ごつごつしているけど、その多角形の脚は意外なほどしなやかで、きびきびと歩き、1m近く垂直ジャンプもする。スプリングやショックアブソーバーはいっさい使っていないが、脚にかかる力を毎秒8000回サンプリングすることによって、素早く反応する。まるでモーター自身が(仮想的に)スプリングでもあるかのように。
動く(前進と上方ジャンプ)ことだけが目的で、自律能力はないし、自分のまわりの世界を理解する能力もない。でもすてきなのは、誰でも作れることだ。特殊なモーターや部品は何も使ってなくて安上がりだから、一般的にロボット工学の最初の教材になるだろう。Doggoを自分で作ってみたい人のための、設計と必要な部品の詳細はGitHubのここにある。
チームのリーダーのNathan Kau氏はスタンフォードの学内紙で「四足ロボットは研究でよく使われるが、研究プロジェクトごとにゼロからそれを開発しなければならない。このStanford Doggoはオープンソースのロボットとして、比較的少ない予算でも各研究者が自分なりの四足ロボットを作れる」とコメントしている。
Extreme Mobilityチームは同大のRobotic Exploration Labとコラボレーションして、Doggoの改良に取り組むつもりだ。改良作はDoggoの倍ぐらいの大きさになり、Wooferと呼ばれる。
[原文へ]
(翻訳:iwatani、a.k.a. hiwa)