サンフランシスコにあるソフトロボット工学のスタートアップであるBreeze Automationは米国時間4月18日、カリフォルニア大学バークレー校で開かれたTechCrunchのTC Sessions、Robotics + AIイベントのステージに登場した。共同創立者でCEOのGui Cavalcanti氏がステージに立ち、同社がNASAや米海軍といった組織から委託されている仕事を紹介したのだ。
Cavalcanti氏が、前回TechCrunchのステージに登場したのは、2016年9月だった。その際は、パイロット用のサングラスと米国旗を身にまとい、戦闘ロボットリーグのMegaBots共同創立者としての登場だった。このBoston Dynamics出身者の最近の仕事は、控えめながらずっと真剣なものになっている。水中や宇宙空間のような危険な状況でのミッションに取り組むものだ。
サンフランシスコにある研究開発施設、Otherlabの一部として設立されたBreezeは、適応力の高いソフトロボット工学というコンセプトを開拓している。この会社のロボットアームは、中に空気を含んだ織物のような構造を採用している。

「Otherlabが約7年間に渡って発展させてきたコンセプトは、Fluidic Robot(流体ロボット)、油圧ロボット、そしてPneumatic Robot(空気圧ロボット)を非常に安価に開発するというアイデアです」と、Cavalcanti氏はイベントを前にしてTechCrunchに語った。「環境に対して高い耐性があり、非常に軽い素材で作られたものです。当初は、最もシンプルなロボットとはどのようなものか、そして最も軽いロボットとは、という問いから始めました。そしてそのアイデアが、繊維と空気で作られたこれらのロボットとして結実したのです」。
Breezeは、そうした原理を構造全体に適用したことによって、ソフトロボットの分野で多くの競合から差別化することができた。既存のロボットアームの先にソフトなグリップを付けたようなものとは根本的に異なるのだ。
「すべてが、大規模な工場から外に飛び出した瞬間に物を言います。そのとき、ロボットが現実の世界とどのように関わり合うのかという問題が、より切実なものになるのです」と、Cavalcanti氏は続けた。「私たちがやろうとしているのは、ソフトロボット工学に関する研究の成果をもっと取り入れ、完全に密閉されたシステムであることの利点を活かし、空気のように本当に柔軟な動力源によって動作させることです。予測不可能な、雑然とした環境で動かそうとした際に、何だかわからないものにぶつかったとします。周囲の状況をセンサーによってくまなく把握できるとは限らないからです。そんな場合、マニピュレータとアーム全体をソフトなものにすることには大きなメリットがあります。単なる作動体では、そうはいきません」。

Breezeは、現在進行中の仕事についていくつか説明してくれた。その中には、米海軍用に開発されたシステムもあった。HTC Viveヘッドセットを使って遠隔操作するものだ。他にも、NASAとの協業で開発を進めているロボットシステムもあった。中枢となるドライブシャフトを必要とせず、伝統的なロボットシステムからの脱却を可能とするものだ。
「今御覧いただいているのは、それなりの荷重がかかるロボットの関節ですが、全体を射出成形で作成することができます」と、Cavalcanti氏は説明する。「金属製のシャフトは必要ありません。ベアリングや、その類のものもまったく不要なのです。射出成形された部品、つまりプラスチックのパーツを組み立てれば、ロボットのできあがりです」。
Breezeが獲得した資金の大部分は、現在のところ米海軍やNASAのような連邦政府との契約によるものだが、同社はこの先、徐々に民間との契約にシフトしていこうとしている。「私たちの現在の使命は、技術をさらに強化して、実社会でのアプリケーションに対応させることです。今は、ほぼ100%それに集中しています」と、彼は言う。「そこを確かなものにできれば、私たちが探求したいと考えている民間用のさまざまな用途の可能性が開けるはずです」。
[原文へ]
(翻訳:Fumihiko Shibata)




 アームの機械部品はごく普通のものである。肘と手首があり、他の多くのロボットアームのように動作し、同様のサーボモーターを使っているといった具合だ。
アームの機械部品はごく普通のものである。肘と手首があり、他の多くのロボットアームのように動作し、同様のサーボモーターを使っているといった具合だ。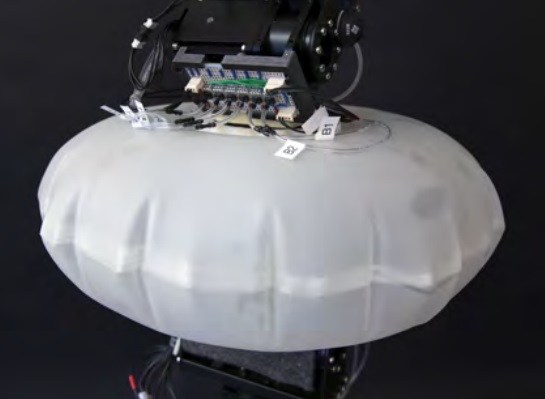 しかし関節の周りは大きな枕のように見えるもので覆われていて、研究者たちはこれを「力感知モジュール」(force sensing module)と呼んでいる。これは空気で満たされていて、それに加わる圧力を検出することができる。これには、サーボモーターを人間から保護し、また逆に人間をサーボモーターから保護するという二重の保護効果がある。また自然な接触相互作用を行うことも可能になる。
しかし関節の周りは大きな枕のように見えるもので覆われていて、研究者たちはこれを「力感知モジュール」(force sensing module)と呼んでいる。これは空気で満たされていて、それに加わる圧力を検出することができる。これには、サーボモーターを人間から保護し、また逆に人間をサーボモーターから保護するという二重の保護効果がある。また自然な接触相互作用を行うことも可能になる。