3Dプリントはハードウェアのデザインや設計の方法を変えたが、しかしどのプリンターも基本的な制約を共有している: それらは要するにオブジェクトを、下の方から、一層また一層と素材を積み上げて作っていく。UC Berkeley(カリフォルニア大学バークリー校)のこの新しいシステムはしかし、ビデオを感光性レジンの入ったジャーに投射し透過することによって一度にオブジェクトを作る。
このデバイスを作者たちはレプリケーター(replicator, 複製機)と呼んでいるが、残念ながらそれはMakerBotの登録商標だ。仕組みとしてはきわめてシンプルだが、それをこの研究のリーダー、バークリーのHayden Taylorよりもうまく説明することは難しいだろう:
基本的には、そこらで売っているビデオプロジェクターでいい。私も、自分の家から持ってきたものを使った。それをラップトップにつないで、計算によって作り出した一連の画像を投射する。それと同期してモーターがシリンダーを回転させれば、その中のレジンが3Dプリントされる。
もちろん、いろいろ細かい点は難しい。たとえばレジンの配合、そして何よりも、投射する画像の計算だ。でも、このツールのきわめてシンプルなバージョンなら、それを作るための障壁はそんなに高くない。
光を使う3Dプリント技術は前からある。今あるそれらのデバイスは、レーザーなどの光を使って素材を目的の形に硬化する。でも、一度に一つの薄い層しか作れないことは同じだ。“ホログラフィック”プリンティングという、交差する光線を使う方法もあるが、かなり難しい…バークリーはローレンスリヴァモア国立研究所と一緒にそのプロジェクトをやったことがある。
Taylorのデバイスでは、最初に、複製を作りたいオブジェクトをスライス状にスキャンする。CTスキャナーに似ているが、実はチームはそもそも最初に、CTスキャナーからヒントを得たのだ。
回転しているレジンに光を投射すると、オブジェクト全体の素材がほぼ一度で硬化する。数回転を要するのだが、個別の描画動作を何百回何千回もやるわけではない。
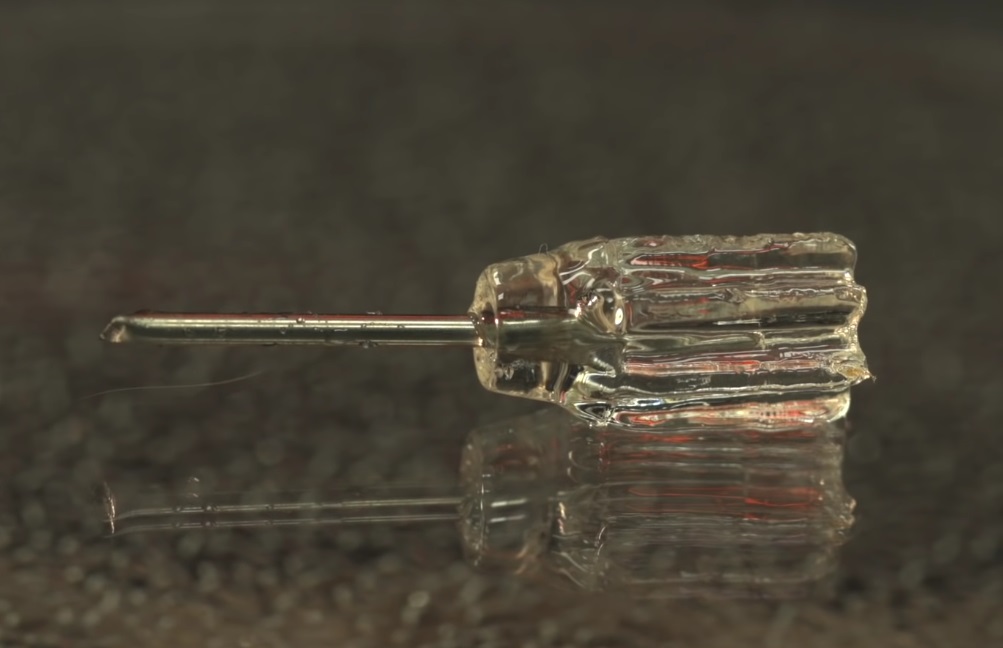
これには、スピード以外にも利点がある。出来上がったオブジェクトは平滑だ…今のプロトタイプ段階ではやや粗いが。また、ほかの3Dプリンターでは難しい突起や空洞も作れる。レジンを既存のオブジェクトのまわりに硬化することもできる。下図は、ドライバーの軸に取っ手を付けた例だ。
ひとつのプリントに色などの異なる複数の素材を使えるし、硬化しなかったレジンはすべて再利用できる。大型化やプリントの精度アップが今後の課題だが、そのアドバンテージには十分な説得力があるから、ずっと持続する研究開発であることは確かだろう。
彼らのペーパーは今週、Science誌に載った。
画像クレジット: UC Berkeley