MITの”Computer Science and Artificial Intelligence Lab”(CSAIL:コンピュータサイエンスと人工知能研究所)は、飛行と地上走行の両者が可能なドローンの新しいプロトタイプを開発した。バッテリー寿命、速度、効率性の観点から最適な手段を探るために用いられる。それは未来の自律型都市交通がどのように運営されるかをプレビューするもので、飛行する車両たちが、お互いに協調しながら密集した都市環境を、シームレスに道路と空路を切り替えながら移動する。
MITで開発されたシステムは、旧来の道路、建物、模式的な公園などを備えた都市ブロックの縮小モデルの中で動作する。現時点ではプロトタイプは理論的には同時に80台の車両を効率的に協調させることができる。着地点、街路、飛行禁止地区その他を、問題なく扱うことが可能だ。
CSAILの研究者たちは、車輪で地上を走行できる8台のクワッドコプタードローンを作製した。これらは走行なら252メートル、飛行だけなら90メートルまでの移動が可能だ。チームは、鳥や昆虫を含む、自然に存在する多くの動物たちが、利便性と必要性に応じて飛行と歩行を切り替えていることを指摘している。そして彼らの作ったロボットも同様に、バッテリー寿命を最大化できるように両方のモードを切り替えるようにデザインした。
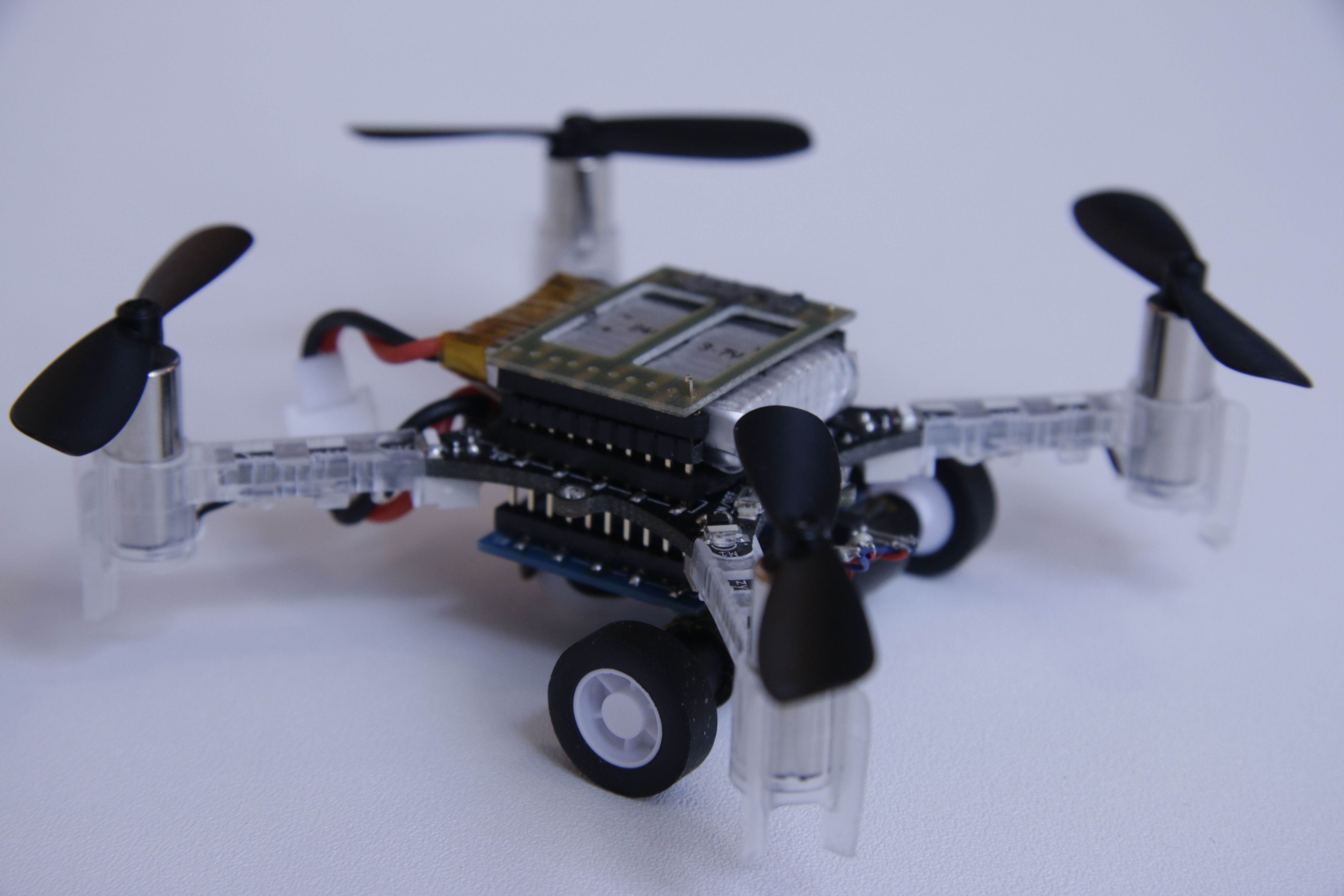
写真提供:Alex Waller, MIT CSAIL.
フライングカーは、密集度の高まる都市環境での移動方法を改善する方法を、探している研究者や民間企業の間で、関心が高まっている領域だ。しかしながら、純粋な飛行は地上走行よりも遥かに大きなパワーを必要とするため、バッテリーの寿命が大きな制約として残されている。現在のバッテリー技術では充電無しでの連続飛行が難しいのだ。混合システムは、理論的には、バッテリ技術の改善の必要性を最小限に抑えながら、トラフィックを軽減し、最終的にはフライングカーをより早期に実現するために役立つ。
これは、フライングカーを日常生活に本当に役立てる方法として、私がこれまで見たものの中では最もクールなアイデアの1つだ。明らかに、本格的なシステムという意味では、コンセプトから現実に至るまでにはまだまだ長い時間がかかるが、いずれにせよこれが始まりだ。
[ 原文へ ]
(翻訳:Sako)