
ライダー(Lidar)は、多くの自動運転車やロボットシステムを構成する重要な部品だが、その技術も急速に進化している。Sense Photonicsという名の新しい会社が、米国時間6月11日に沈黙を破って、2600万ドル(約28億円)のラウンドAとともに登場した。とても広い視野と(文字通り)柔軟な設置を可能とするまったく新しいアプローチがその売りだ。
まだプロトタイプ段階ではあるが、8桁(数千万ドル)の投資額を引きつけるだけの魅力は確かに持っている。Sense Photonicsのライダーは、一見従来のものとは劇的に違っているもののようには見えない。だがその違いは裏側に隠れているものだけではない。
Velodyneのような初期のポピュラーなライダーシステムは、赤外線レーザーパルスを放射し検出する回転モジュールを使用して、光の往復時間を測定することによって周囲を検出していた。その後のモデルでは、例えばDLPタイプのミラーやメタマテリアルベースのビームステアリングといった、あまり機械的ではないもので回転ユニットが置き換えられている。
これらのシステムはみな、光のビームや、柱、あるいはスポットを、風景に対してある決まった手順で順次照射していく「スキャン」システムである。しかし、風景全体を一度に大きな照射(フラッシュ)で照らし出す「フラッシュ」ライダーを、なんとか実装できた企業はごくわずかだった。
それこそがSenseの開発したもので、彼らは既存のシステムの通常の欠点、すなわち限られた解像度と範囲の問題を回避できたと主張している。それだけでなく、レーザーを放射する部品(エミッター)と、パルスを計測するセンサーを分離することによって、Senseのライダーは車全体を再設計することなく、設置することが簡単になる。
私は、レーザーシステムのベテランエンジニアでありCEO兼共同創業者であるスコット・バロウズ(Scott Burroughs)氏に、何がSenseのライダーを他の競合相手のものとは違うものにしているのかを尋ねた。
「まずレーザーエミッターですね」と彼は語った「私たちは、よりよい熱効率と目に対する安全性を達成するために分散された、文字通り莫大な数のレーザー素子で構成された装置を作る、秘密のレシピを持っています」。
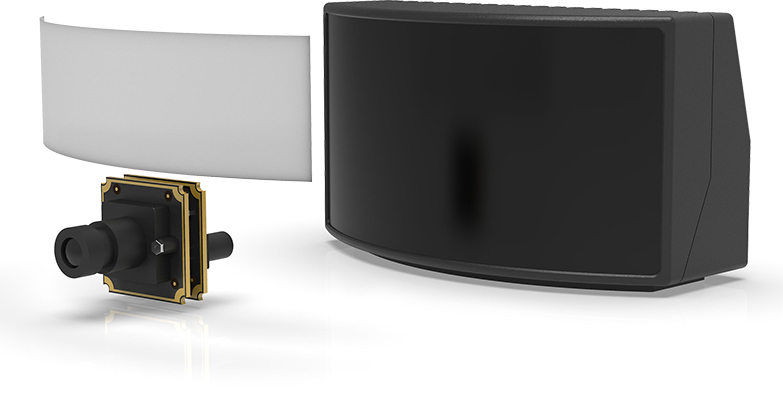 これらのの小さなレーザー素子たちは、柔軟な裏地の上に貼り付けることができる。つまりレーザー素子の集まりを湾曲させることができるということであり、これによって大幅に視野が拡大する。通常のライダーユニット(360度のものを除く)は、おおよそ水平方向に120度の視野を持っていることが多い、これは水平面に置かれたセンサーとエミッターから確実に取得できるものがその範囲のものだからだ。そしておそらく垂直方向には50から60度の視野角度を持っているだろう。
これらのの小さなレーザー素子たちは、柔軟な裏地の上に貼り付けることができる。つまりレーザー素子の集まりを湾曲させることができるということであり、これによって大幅に視野が拡大する。通常のライダーユニット(360度のものを除く)は、おおよそ水平方向に120度の視野を持っていることが多い、これは水平面に置かれたセンサーとエミッターから確実に取得できるものがその範囲のものだからだ。そしておそらく垂直方向には50から60度の視野角度を持っているだろう。
「私たちは、前例がないと思われる、垂直方向に90度そして水平方向に180度の視野を得ることが可能です」とバロウズ氏は誇らしげに語った。「そしてそれが、これまで話をもちかけた自動車メーカーたちが、とても興奮している点です」。
ここで説明しておく価値があるのは、ライダーシステムは2種類のものに分かれ始めているということだ。1つは前方に向いた長距離用ライダー(LuminarやLumotiveによるものなど)で、200m前方の路上の障害物や人物を検出する。またもう1つは、より短距離で幅広い視野を持つライダーで、より近接した状況認識のために用いられる。例えばバックする車の後ろにいる犬や、数m先の駐車スペースから出てきた車などを検出する。Senseのデバイスは、この2番目のユースケースに非常に適しているのだ。
 これらは単なるプロトタイプ装置だが、きちんと機能しており、単なる概念モデル以上のものである
これらは単なるプロトタイプ装置だが、きちんと機能しており、単なる概念モデル以上のものである彼らが提供する2番目の興味深いイノベーションがセンサーだ。これは通常はライダー装置の一部に組み込まれているものだが、このシステムではエミッターとは完全に切り離して設置することが可能な、少しばかり特殊なカメラなのである。つまり、エミッターはヘッドライトのようなカーブした部品に統合することが可能になり、一方小さな検出装置たちを既に従来カメラが設置されていたようなサイドミラーやバンパーなどの上に置くことができるのだ。
カメラのようなアーキテクチャは、設置に際して本当に便利なものとなる。また、システムが周囲の画像を再構築する方法にも根本的な影響を与えるのだ。彼らが使用するセンサーは普通のRGBカメラにとても近いものなので、前者からの画像は後者の画像に非常に簡単にマッチさせることができる。
ライダーの深度データと、従来のカメラ画像が、すぐにピクセル単位で対応付けられる
従来のほとんどのライダーは3Dの点群を出力する。これは、ビームが異なる範囲に対して発見した何百万もの点の集合である。これは、従来のカメラとは非常に異なる「画像」の形式であり、点群の深さと形状を2DのRGB画像に変換したり比較するためには、ある程度の作業が必要である。Senseの装置は、2Dの深度マップをネイティブに出力するだけでなく、そのデータを対になるカメラと同期させることができるので、可視光画像をピクセルごとに深度マップに一致させることができる。このことは計算時間を節約し、よって遅延を減らすことになるが、これは自律型プラットフォームにとっては良いことなのだ。
Sense Photonicsの装置は、ここに見られるような点群を出力することもできる
現金が手元にあることは良いことだ。だが同社はまた、Infineonやその他の企業たち(その中には名前は明かされていないがティア1の自動車会社も含まれていて、明らかに最初のSense Photonics製品の開発に協力していることだろう)と提携も行っている。詳細に関しては、内容がより確定する今年後半を待たなければならないだろう。実際の製品生産はその数カ月後に始まることになる。まだ明確なタイムラインはわかっていないが、こうしたこと全てが今年中に行われることが期待されている。
バロウズ氏はプレスリリースで、「私たちのチームとテクノロジーに対する、投資家の皆さまからの信頼の厚さを、高く評価しています」と語っている。「私たちに寄せられた要求は、水面下で活動していた間でさえ、並外れて大きなものでした」。
[原文へ]
(翻訳:sako)