カーネギー・メロン大学ロボット・ラボが開発したスネークは迫力の点でロボットのデモの王座を占めてきた。聖書に出てくるヘビをモチーフにしたということだが、細長く柔軟な動作が可能で、頭部に設置されたカメラで誘導されて狭いスペースに潜り込むには最適の形態だ。このロボットはとぐろを巻ける。柱などに上って視界を確保することができる。全体としてエンジニアリングの傑作だ。
スネーク・ロボットは故郷のピッツバーグを離れ遠くギザのピラミッドやオーストリアの廃発電所などを探るのに活躍してきた。
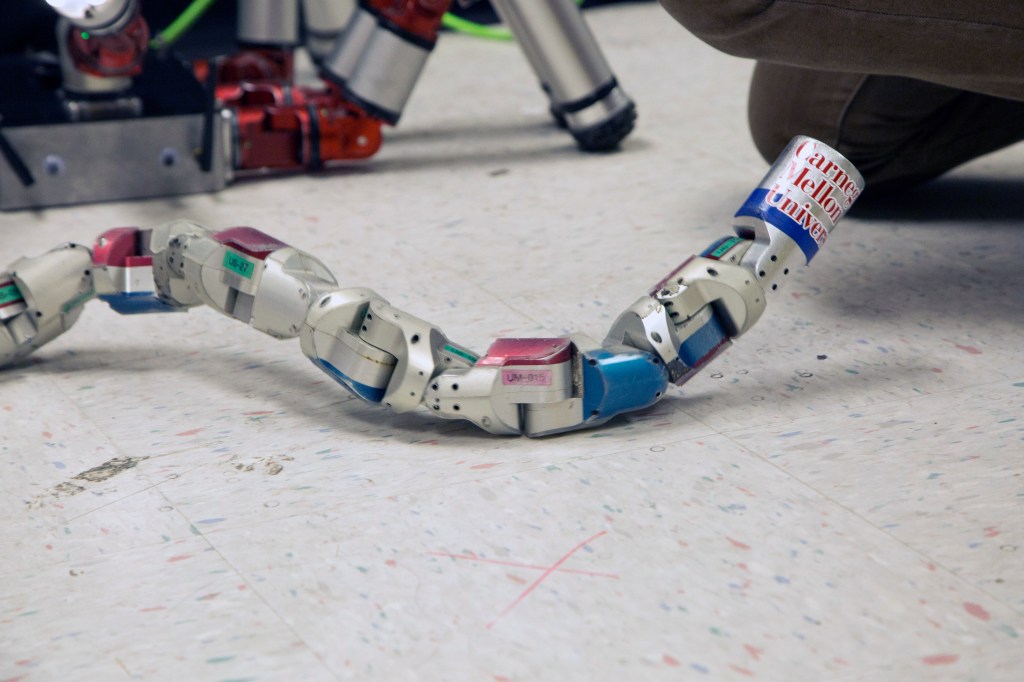
CMUのバイオロボティクス・ラボは10年前ほどからプロジェクトをスタートさせている。2年後には早くも最初のスネーク・ロボットを発表している。以来、複数の民間企業がヘビ型ロボットの商用化に取り組んできた。大部分は人間の進入が困難あるいは不可能な場所での捜索・救難が主目的だった。一方CMUではロボティクスを次世代に進めるための研究が続けられた。
最近のバージョンではスネーク・ロボットに感圧センサーが加わり、締め付ける力をリアルタイムで調整できるようになった。これにより事前に締め付け力をプログラムしておく必要がなくなり運用の柔軟性が飛躍的に増した。開発チームはまたロボットのモジュール化をさらに進めた。全長を必要に応じて変えることができるよう中間セグメントを後から増減できるようにした。.

モジュール化かはロボティクスにおける大きなトレンドの一つで、その目的はロボットの多機能化にある。いわばロボットのレゴ化だ。実際、CMUののテクノロジーをベースにHEBI〔ヘビ〕がスピンオフしている。このスタートアップはスネーク・ロボットに用いられたアクチュエータをプラグ&プレイ化して普及を図っている。
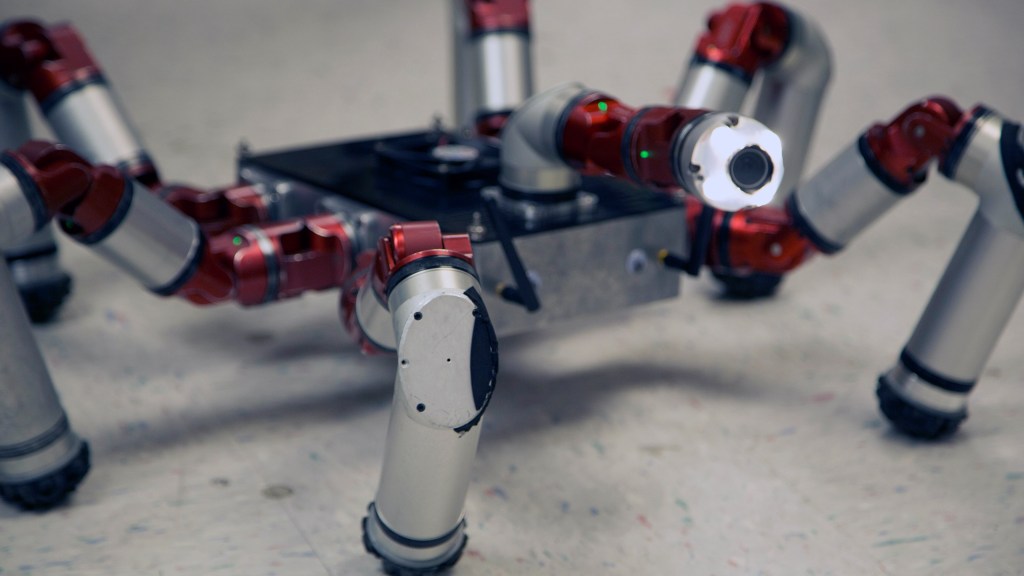
われわれが最近ピッツバーグのCMUのラボを訪問したところ、スネーク・モデルとはまったく異なる原理の6脚ロボットに出迎えられた。みたところは昆虫か甲殻類に見える。ただしサイズは小型犬くらいある。四角い胴体から爬虫類的な頭部が横倒しの潜望鏡のように突き出していた。動作を仔細に観察すると昆虫的ロボットもスネーク・ロボットのDNAを受け継いでいるらしい。開発チームはスネーク・モンスターと呼んでいた。
スネーク・モンスターの脚と頭部のジョイントは先行するスネーク・ロボットに用いられたものと同じだが、構造が異なるためにフランケンシュタインの怪物的な印象を与える。新しくボディーが設けられことでバッテリーその他の機器を収めるスペースが生まれた。この6脚ロボットは電源供給等のテザリングなしで、自立して長時間歩きまわれる。スネーク・ロボット同様感圧センサーを装備しているため足場の不安定な瓦礫の上なども動き回れるという。
「このロボットは地表がどこにあるのか視覚的に確かめることが難しいランダムな凹凸の上であっても脚の感覚を頼りに自由に歩くことができる」と博士課程の大学院生、Julian Whitmanは説明した。【略】

スネーク・ロボットと同様、新しい多脚ロボットも動物が環境に適応して動き回るようすにヒントを得ているという。このスネーク・モンスター・ロボの場合、センサーで地表を感知できるのが特長だ。スネーク・ロボット同様、不安定な表面を動き回ったり柱に上ったりするために事前のプログラミングは必要ない。またカメラによる視覚情報がなくても行動できる。ロボットの脚に用いられている柔軟性のあるアクチュエーターがさまざまな障害物の上を動くのに大きな役割を果たしており、たとえばロボットがバランスを取るのにも役立っているという。
[原文へ]
(翻訳:滑川海彦@Facebook Google+)