
みんなで力を合わせれば、なんでもできる ― そして誰も落ちこぼれない。それがこの “VelociRaACH” という小さなロボットたちが与えてくれた教訓だ。
名前は、Velocity Robotic Automous Crawling Hexapod[高速自立這いまわり6脚類ロボット]の略で、これがすべてを説明している。作ったのはカリフォルニア大バークレー校のBiomimetics Millisystems Labのロボティック研究者たちで、ここでは他にも数多くの自然に触発された機械や材料が作られている。
小さな昆虫ロボットたちは特に新しいものではないが、その協調行動は新しい。研究者のCarlos Casarezは、オーストラリアのジャンピングアントというアリの行動に興味をかき立てられた。そのアリは2匹以上が協力して困難な地形を進んでいた。アリにできるなら、小さな6脚ロボットにだって!
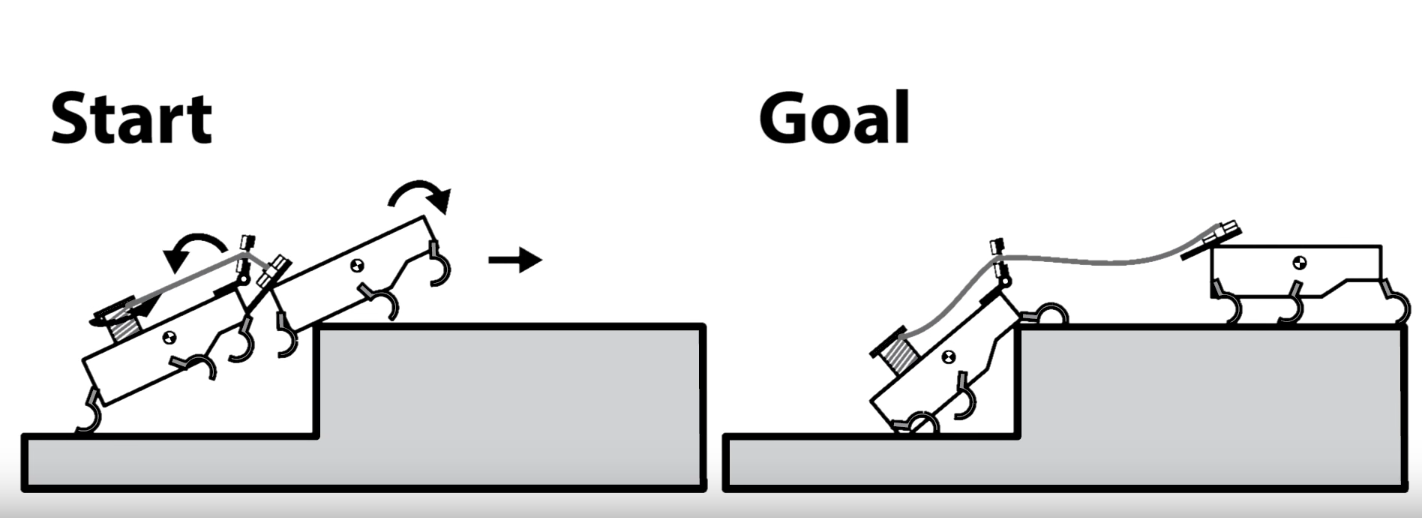
ロボットは、2匹でペアを組ませて自分たちより大きい障害物を乗り越えさせることにした。障害物は1匹だけでは越えられない。VelociRoACHたちには、決められた作業や一連の「プリミティブ」がプログラムされている。
まず、先頭ボットが障害物によじ登り、前足を上に置く。後発ボットは磁石で先頭ボットに近付き、押し上げる。次に先頭ボットは前進し、後発ボットも大暴れしながら追いかける。そして磁石を切り離し、2匹は再び進み始める。
動きはビデオで全部見ることができ、全体のプロセスはこれまで見たロボットの中で一番キュートだ。
この実験は学術目的だけではない。このような小さくて安価なロボットは、例えば災害地に何十、何百体も配備することが可能なので、このテクニックが(あるいは3体以上の協調も)、がれき等の障害物の中を進むのに役立つかもしれない。適切なセンサーを使えば、建物や地点を協力して識別することもできるだろう。そして、ターミネーター風の恐ろしい応用を考えるのも難しくない。
現時点で、彼らの協調行動はまだ少々危っかしい ― ビデオに映っているのは何度も試みた中の成功例だけだ。それぞれの「プリミティブ」はほぼ半分が失敗に終るが、それはロボットがごく基本的なものだからだ。
「将来は、ロボット間の位置確認を含めたクローズドループ・フィードバック制御や、接続接触センサー、各ロボットのIMU、モータートルク情報等を加えて、協調ステップクライミングの信頼性を改善するつもりだ」と、CasarezがIEEE Spectrumに話した。彼は、10台以上のロボットチェーンや、地上ボットと空中ボットの協調の可能性にも触れた ― これはETH Zurichが既に検討している。
マルチボット・クライミング技術の詳細に関する論文は、今月ストックホルムで行われるICRA 2016で発表される。
[原文へ]
(翻訳:Nob Takahashi / facebook)