
人間の大人でも、人混みの中を歩くのが難しいことがある。ましてや、不器用で素朴な脳のロボットはどうだろう? 人にぶつかることを避けるために、“右へ行くべきか左か?”を一瞬々々ぎごちなく考えながら歩く、…スタンフォード大学の研究者たちは、彼らのロボット”Jackrabbot”が、そんな路上のルールを学習できる、と期待している。
同大のComputational Vision and Geometry Lab(コンピューターによる視界とジオメトリ研究所)はこれまですでに、歩行者の動きを追跡して予測するコンピュータービジョンのアルゴリズムを作ってきた。しかしそのルールはきわめて複雑で、群衆や歩道の幅、一日の中の時間帯、自転車やベビーカーの有無、等々大量の変数を含むため、まさしく、そのほかの機械学習のタスクと同じく、有益な結果を得るためには膨大な量のデータを必要とする。
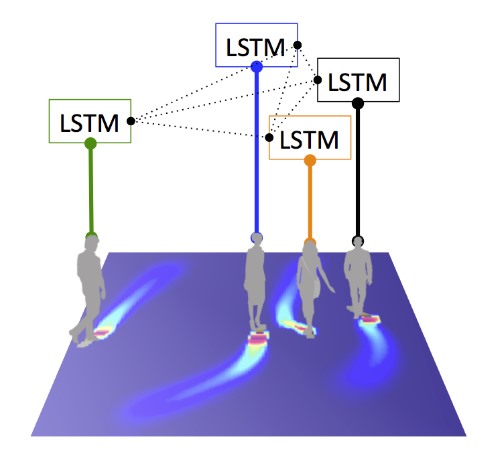
しかも、彼らが開発しているアルゴリズムは、完全に観察データだけを使用し、それをニューラルネットワークが解釈することを意図している。研究者たちが、ヒント(“この状況では人は必ず左へ行く”など)を与えてはいけない。
彼らのこれまでの努力は小論文に記され、今月の終わりごろ出るCVPRに掲載される。彼らが作った動き予測アルゴリズムは、多くの同種アルゴリズムよりも優れており、そのモデルは、人が集団の中で相互作用/反応する場合の複雑微妙ぶりをある程度学習できた。
現在、楽しげにめかしこんだJackrabbot(上図)は、人間が手動でコントロールしながら、研究のモデルをロボットの知覚に実装する方法を模索している。その本体は実はSegway RMP210の改造バージョンで、ステレオカメラとレーザースキャナーとGPSを搭載している。訓練用データは鳥瞰ビューを使用したが、ロボット本人には鳥瞰的視界を持たせずに、さまざまな歩行者の互いの距離と歩行速度から、空間中の各個人の座標を求め、彼らの動きを高い精度で予測させる。

研究者のAlexandre Alahiは本誌へのメールで、“この夏には、私たちの社会的知覚を持つ予測モデルをロボットに実装したい。リアルタイムのデモは、年末までには行いたい”、と言っている。
人間の空間を無事にナビゲートできるロボットが、まだ万人の目の前ではないけれども、どこかSFにほとんど近いような場所に、出現しようとしている。しかし、われわれが日々、思考を必要とせずに行っていること…回りをスキャンしその場の障害物と運動物を判断し、それに応じて自分の動きを適切に計画すること…は、コンピューターにとってものすごく難しいことなのだ。
このようなプロジェクトの多様な蓄積の中から、最終的には、家の中や都市の中を人間と同じようにはやく安全に、他人に配慮しながら歩けるロボットが生まれるだろう。自動運転車がたぶん都市の道路の様相をすっかり変えてしまうように、自律性のある歩行者ロボットは、それがヒューマノイドであろうとなかろうと、歩道の状況を変えるだろう。