ドローンはいろんなことで便利に使えるが、その便利さは彼らが空中にとどまれる時間に制限されることが多い。もっと軽くなるべきかもしれない。でも、上図のようなかぎ爪をつけたドローンなら、どこにでもとまったり自分をひっかけたりして電池の無駄遣いを防ぎ、飛行時間を延ばせるだろう。
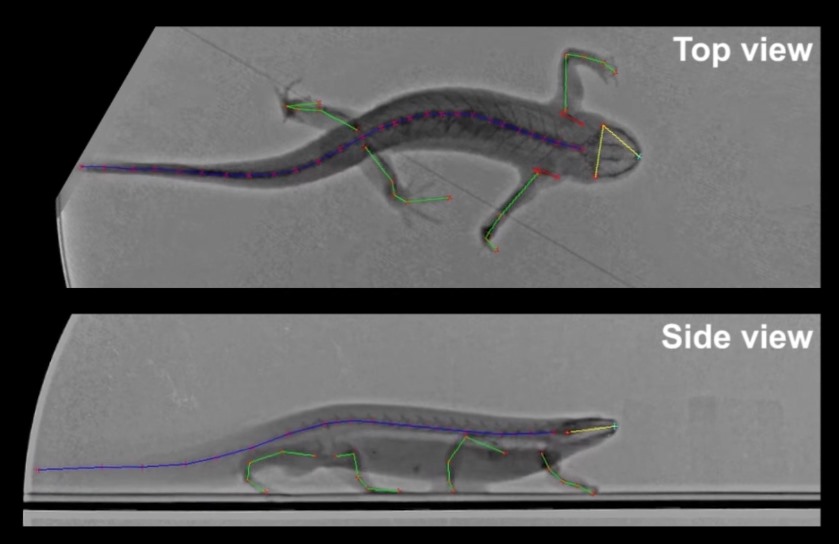
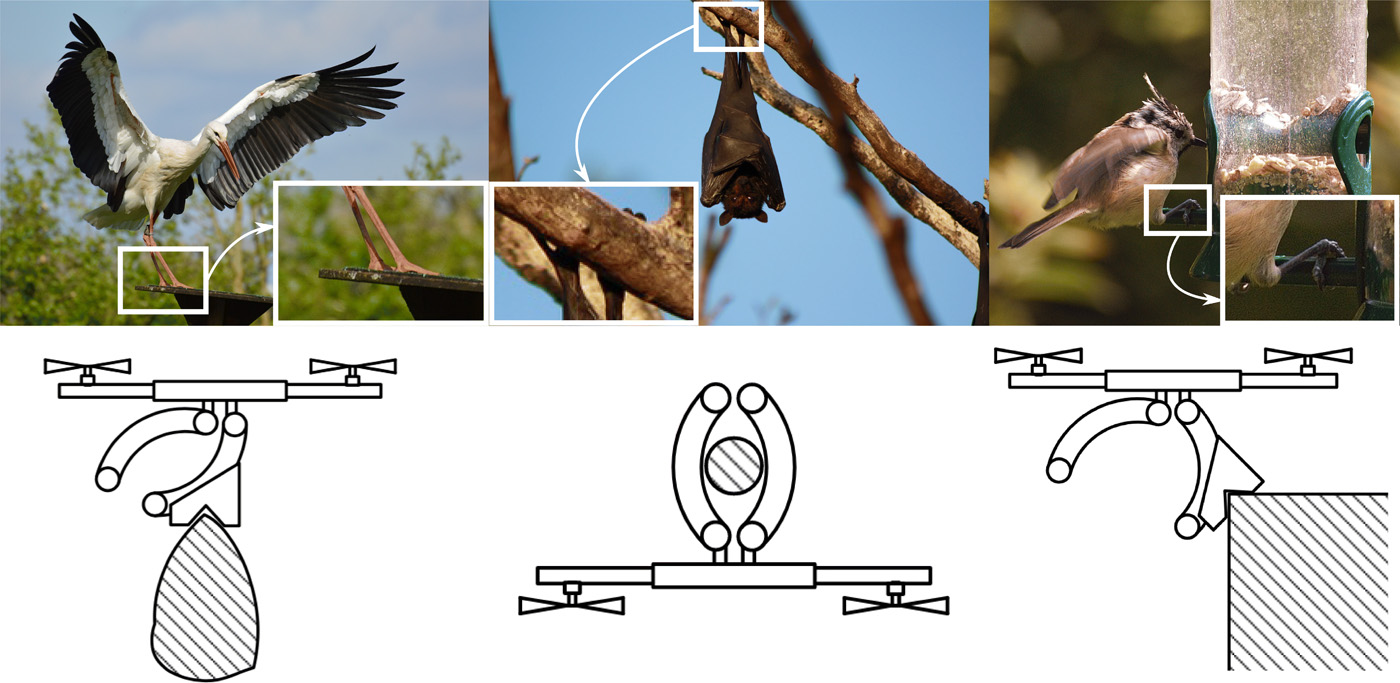
そのかぎ爪は、この記事の最後でご紹介するように、ものすごく多国籍の研究者チームが鳥やコウモリからヒントを得て作った。チームは、鳥などの空を飛ぶ動物が、自分がとまりたい面の性質に合わせて独自の脚やかぎつめを発達させていることに気づいた。どこかに座ることもあれば、どこかにぶら下がることもある。羽根をたたんで、どこかに寄りかかることもある。
研究者たちは、こう書いている。
これらのどんな場合でも、動物の足の適切な形をした部分が環境中の面と対話をして、飛ぶ努力を減らしたり、完全にとまったりする。私たちの目標は、このような、「とまる」(Perching)という行為を無人航空機にさせることだ。
え、ドローンを鳥のように木にとまらせるの?まさか!
我々は、回転翼で飛ぶ無人航空機のために、外部動力で動作するモジュール構造の着陸装置を設計した。それは、動力式の握り部(Gripper、グリッパー)モジュールと、それの指に装着される接触部(Contact、コンタクト)モジュールから成る。
モジュール構造にしたために、とまったり休んだりするために使える構造物の形状や種類の範囲が、単純に鳥の脚やかぎつめを模倣する場合に比べて大きく広がった。
関節のある足のような単体で複雑な構造物を避けて、チームはドローンに、3Dプリントで作った特殊な形状の静的モジュール複数と、ひとつの大きなグリッパーを与えた。
ドローンはLiDARなどの奥行き検知センサーを使って自分のまわりを調べる。近くにある面の性質も検知して、自分がとまれる面の例を収めたライブラリとマッチングする。
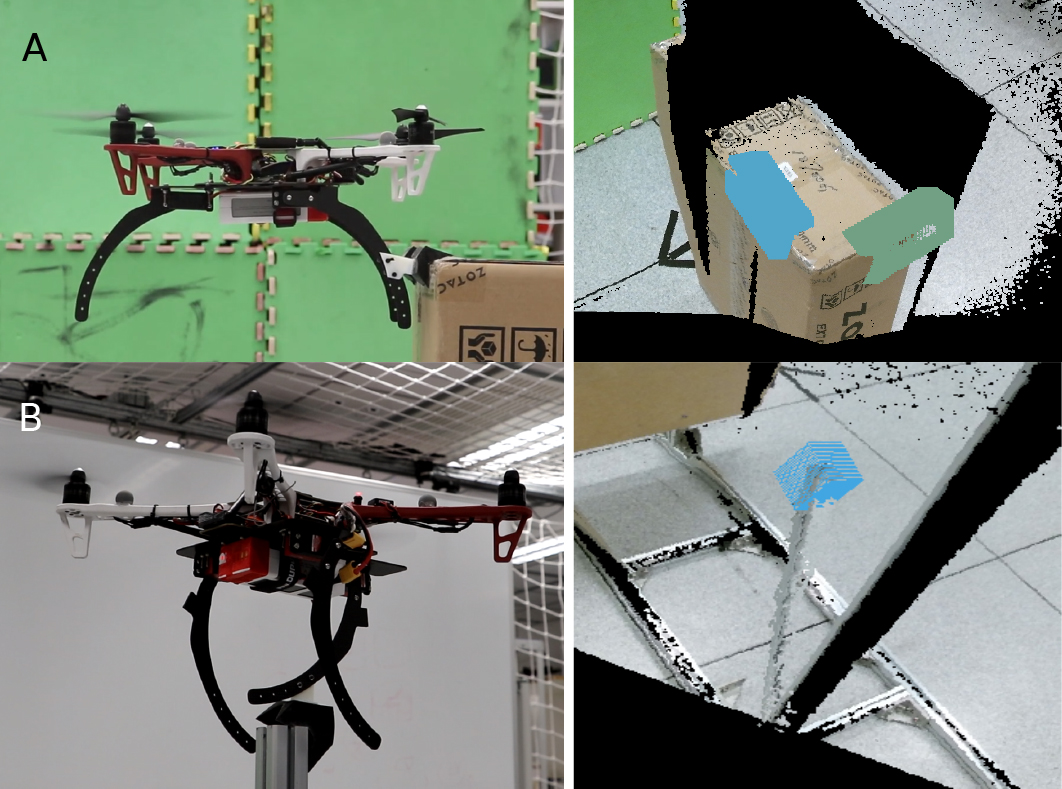
上図右上のような四角いエッジでもAのようにとまれる。柱ならBのようにバランスをとる。
柱があってそこにとまりたければ、その柱を上からつかむ(上図下左)。水平方向の棒なら、握ってぶら下がったり、必要なら起き上がったりする。棚のようなものなら、小さな穴を開けて自分をその隅に固定する(上図A)。そのとき、モーターは完全に停止できる。これらのコンタクトモジュールは、ミッションの性質や状況に応じて形を変えられる。
率直に言ってこれは全体的に、プロトタイプにしてはできすぎだ。難しいのは停泊に使える面の認識と、正しく着地するための姿勢制御だろう。でも現状ですでに、十分実用性がある。業務用や軍用なら、これでも十分ではないか。数年後にはこれが、すべてのドローンの標準装備になるかもしれない。
このシステムを説明しているペーパーは、Science Robotics誌に載っている。省略してもよい人は一人もいないと思うから執筆者全員を挙げると、エール大学と香港科学技術大学とスウェーデン王立工科大学のKaiyu Hang氏、Ximin Lyu氏、Haoran Song氏、Johannes A. Stork氏、Aaron M. Dollar氏、Danica Kragic氏、そしてFu Zhang氏だ。
[原文へ]
(翻訳:iwatani、a.k.a. hiwa)