ロボットが、病院やスマホ修理店などで仕事を手伝う場合、少なくともそっとモノに触れる必要がある。まったく何にも触れずに手伝うということは可能なのだろうか? 超音波を利用して物体を空中に浮遊させて支えるグリッパーを開発した研究者がいる。非常にデリケートな作業にも適用できるものだ。

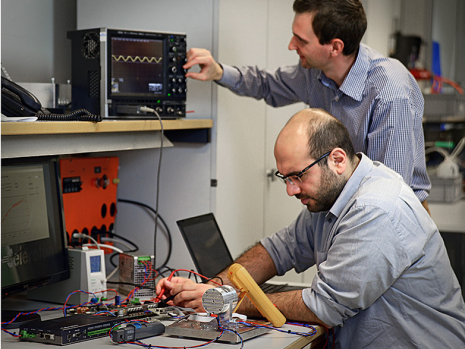
画像クレジット:Stefan Weiss/ETH Zurich
これは、極めて精緻に制御された周波数と音量で音波を発生する小さなスピーカーの配列で実現されている。それらが、ある種の定在圧力波を発生し、物体を持ち上げる。また、さまざまな方向から圧力をかけることで、その場に静止させたり、動き回らせることも可能だ。
このような「音響浮遊」自体は、そういう言葉もあるように、まったく新しいものではない。あちこちで奇術の類として使われてきた。しかしこれまでは、これといった実用的な用途はなかった。しかし、ETHZürichのマーセル・シャック(Marcel Schuck)氏と彼のチームは、このようなポータブルなデバイスが、小さな物体を非常に優しく保持する必要があるような作業に使えそうなことを示した。
たとえば、小さな電気部品、腕時計やマイクロロボット用の油を塗布した微小なギアやベアリングは、物理的な接触なしに保持するのが理想的。接触すれば静電気を伝えたり、汚れを付着させてしまうことがあるからだ。そのため、そうした作業に使うロボグリッパーは、清浄な状態に保ち、隔離しておく必要がある。しかし、音響による操作なら、汚濁の可能性は大幅に低くできる。

ちょっと不気味な見た目の別のプロトタイプ
問題は、対象の物体を空中に浮遊させるのに、どのような周波数と振幅の組み合わせが適切なのかが、必ずしも自明ではないこと。そのため、この仕事の大部分は、新たな物体に対して、それを扱えるよう簡単に調整できるソフトウェアを開発することだった。それには、回転させたり、ひっくり返したり、ユーザーが意図したように自由に物体を動かせるようプログラムする機能も含まれる。
実際に動作するプロトタイプも完成した。シャック氏は、さまざまな業界にアンケートを実施して、そのようなデバイスが実際に役立ちそうか、役立つとすればどのような用途に使えるのか、調査することにしている。スイスでは、もちろん腕時計の製造は重要な産業であり、部品は小さく、接触に弱い。「たとえば歯車は、まず潤滑油でコーティングされ、その潤滑油の皮膜の厚さが測定されます。ほんのちょっと触れただけでも、その被膜にダメージを与えてしまうことになるのです」と、ETHZのニュースリリースで、同氏は指摘している。
腕時計職人は、そのようなロボアームをうまく活用できるのだろうか? マイクロロボットの設計者はどうだろう? または生化学者の役にも立つのだろうか? 潜在能力があるのは間違いないが、必ずしも用途は明確になっていない。同氏は幸い、そのような疑問を調査するための特別研究予算をいくらか持っている。もしその結果、実を結びそうな用途が見つかれば、来年あたりスタートアップとしてスピンオフしたいと考えている。
(関連記事:傷つきやすい海洋生物を捕獲できる「超優しい」ロボットハンド)
[原文へ]
(翻訳:Fumihiko Shibata)