Tridentはリモコン制御のカメラ付水中ドローン ― そして、ロボティックのスタートアップ、OpenROVが作った最速のマシンだ。
Tridentは、「マイケル・フェルプスぐらい速く」泳げる、と共同ファウンダーのDavid LangとEric Stackpoleは言う。ちなみに、100メートル50秒77を換算するとフェルプスの速さは時速4.4マイル[7.1 km]になる。つまり、金魚よりは速いが、みんなの思うほどは速くはない。それでも水中乗り物としてはかなり速いし、もっと遅いドローンもある。
もう一つTridentがすごいのは、その正確な挙動だ。Tridentは、「トランセクト」と呼ばれる調査用に引かれた線の上を長時間真っすぐ泳ぎ、急停止したり狭い場所を動き回ったりできる。制御にはどんなゲームコントローラーでも使える(われわれはパソコンのモニターにつながっていたプレイステーションのコントローラーを試した)。
この種の敏捷性と正確性は、海中を行き来するのに役立つ。Tridentは、高速でも低速でも縦揺れすることなく、障害物を越え、深さや方向を変えることができる。そこに沈没船(もしかしたら財宝も)を探索するために思い通りの正確な位置に止まれる能力が加わり、水中探険にもってこいだ。
Tridentは、OpenROVの他の機種と同じく、海のかなり深い部分まで、殆どの人間よりも深く潜ることができる。Tridentは水深100メートル ― 人間が潜水できる限界 ― まで到達できる。
この水中ドローンは、探険中にライブビデオをモニターにストリーミングすることができる。そしてOpenROVのチームは現在VRを研究中なので、ドローンを潜らせて自分がその深さにいる気分を味わえるようになるかもしれない。
人はVRのあらゆる用途を思いつくが、Tridentは教室での利用に最適だ。「将来これを授業で使い、生徒全員がGoogleのVRヘッドセットを着けて、海中の様々なものを見るところを想像してほしい」とLangは言った。
OpenROVは、未知の海底を探険しようと友人同志で作ったプロジェクトが始まりだった。伝説によると、1800年代に先住アメリカ人のグループが、カリフォルニア州ヘイフォークのホールシティー洞窟の泉の底に、山ほどの金塊を沈めたという。私が最初にOpenROVとこの海底探険について書いたのは、2013年11月のUSA Todayだった。
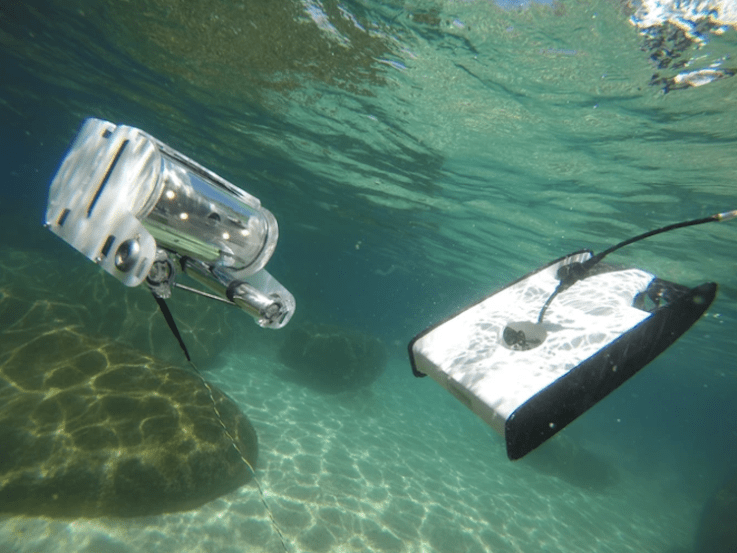
OpenROV DIY kit meets Trident under the sea.
ファウンダーたちはまだその泉の底に到達していないが(彼らの探査機が行けるところまで行ったが底には届かなかったと二人は言う)、数年前にこの会社を立ち上げた。それは簡単で低価格な水中ドローンのDIYキットを誰もが手に入れられるようにしたかったからだ。以来OpenROVは、数百万ドルの資金をベンチャーキャピタルから手に入れ、新たなデザインを探究しており、Tridentはその一つだ。
OpenTOVは、TridentのKickstarterプロジェクトの最終段階に入っている(残り1日)。これまでに80万ドル近くが集まっている ― ファウンダーらが当初想像した5万ドルを大きく上回った。
最近私はカリフォルニア州バークレーのOpenROV本社を訪れた。そこではロボットのデザイン、製造、出荷、サポートまで行われている。Stackpoleは、工業団地の中心にある彼の広大なガレージに私を連れていき、テスト用にチームが用意した水槽で、私にTridentで遊ばせてくれた。詳しくは上のインタビュービデオをご覧あれ。
[原文へ]
(翻訳:Nob Takahashi / facebook)











 当時私は地元のErol’s(後にBlockbuster Videoになった)の列に並んでDouble Dragonをレンタルした。なぜ普通に買わなかったのかよくわからない、10本は買えるくらい何度も借りていたのだから。でも、そんなことは関係ない。カセット把み文字通り家まで走ってプレイした興奮は忘れられない思い出だ。
当時私は地元のErol’s(後にBlockbuster Videoになった)の列に並んでDouble Dragonをレンタルした。なぜ普通に買わなかったのかよくわからない、10本は買えるくらい何度も借りていたのだから。でも、そんなことは関係ない。カセット把み文字通り家まで走ってプレイした興奮は忘れられない思い出だ。





























































 「これは進化だ」と彼は言った。「われわれがやったのは、[Nexus 6]で何が起き、その前の年にNexus 5で何が起きたかを調べることだった。5シリーズでしたことは進化的な変化だった。6ではもう少し特徴的な、市場で他と大きく異なることをやりたかった。
「これは進化だ」と彼は言った。「われわれがやったのは、[Nexus 6]で何が起き、その前の年にNexus 5で何が起きたかを調べることだった。5シリーズでしたことは進化的な変化だった。6ではもう少し特徴的な、市場で他と大きく異なることをやりたかった。