【本稿の筆者、Jay Samitは連続起業家で、 “Disrupt You!” の著者。】
車の運転は2030年までに違法になる。われわれの経済は深刻な打撃を受けるだろう、なぜなら数百万のトラック運転手、タクシー、配達人らが職を失うから。この終わりなき革新の時代、1世紀にわたる人と自動車との関係は、永久に破壊されようとしている。
その理由は、ミレニアル世代にもUberにも気候変動にも、大量輸送手段の改善にも関係ない。運転が違法になるであろう、そしてそうなるべき理由は、今われわれが交通事故死という世界最大の早期死亡原因のひとつを未然に防ぐテクノロジーを手にしているからだ。毎年全世界で120万以上の人たちが交通事故で亡くなっている(朝鮮戦争の双方で発生した犠牲者数よりも多い)。
昨年、27万5000人以上の中国人、28万8000人以上のインド人、および3万3000人のアメリカ人が、回避可能な交通事故で死亡した。ラルフ・ネーダーがこの産業を「どんなスピードでも自動車は危険」と1965年に初めて指摘して以来、自動車メーカーは車の安全性と信頼性を飛躍的に改善してきた。
シートベルト、エアバッグ、アンチロックブレーキ、タイヤ空気圧監視システムはいずれも交通事故死を減少させた。しかしこれまで、自動車メーカーは交通事故死の唯一最大の原因に対処できていない:人的過誤だ。今われわれは数百万の命を救うテクノロジーを手にしているが、社会としてその利用を義務化する意志力を、果たしてわれわれは持っているだろうか?
無人走行車は、飲酒運転も、わき見運転も、運転席で居眠りをすることもない。
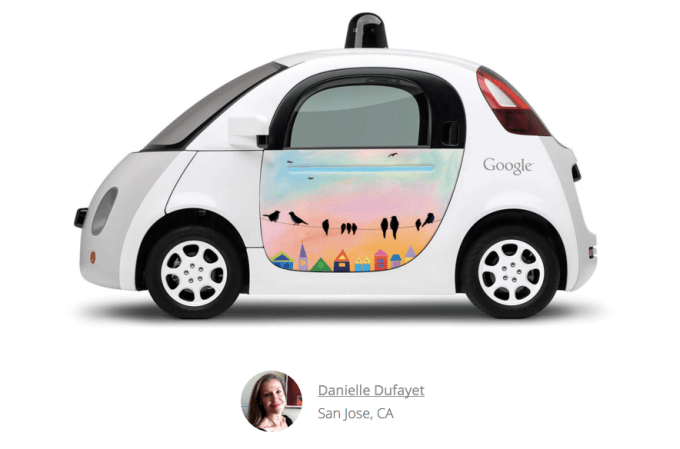
Googleの無人運転車は、人間運転車が支配する路上で既に100万マイル以上を走行している。儚き命のわれわれ人間と同じ現実世界の道路条件のもとで、自動走行車は雨やみぞれや雪の中を走ってきた。これらの無人車両は、地球40周分に相当する距離を走った ー 事故を起こすことなく。
実際には、無人運転車は人間運転車に11回衝突されているが、事故の原因になったことは一度もない。データによると、地球上の衝突事故の94%は人間ドライバーの過誤が原因だ。そして教育や訓練にどれほど時間をかけても、ハンドルを持った人間の行動は改善されない。今やアルコールは、世界の交通事故関連死全体の1/3以上の原因である。
合衆国では、事故の4件に1件が、ながらスマホ運転によって起きている(飲酒運転による事故の6倍以上)。人間の手にテクノロジーを持たせれば持たせるほど、運転習慣は悪くなる。そしてロボットと異なり、人間には休息が必要だ。国立睡眠財団によると、成人ドライバーの69%が月に一度以上運転中に眠気を感じている。
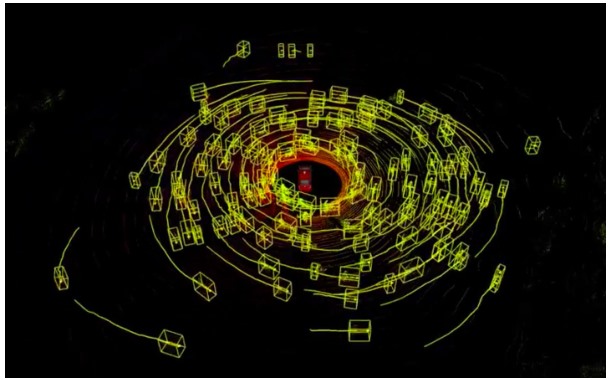
無人走行車は、飲酒運転も、わき見運転も、運転席で居眠りをすることもない。車両には、カメラ、赤外線センサー、ネットワーク接続された地図、その他様々なソフトウェアが装備され、人間には成し得ない方法で正確に危険を回避することができる。
早めにブレーキをかけ、素早く方向を変え、人間の目には認識されない道路条件の変化(例えば、ヘッドライトの可視範囲外の障害物)を予測することができる。ロボットは、人間が操縦する車よりも効率的かつ効果的に、互いに情報交換することもできる。
ロボット車向けのWazeを想像してほしい:数百万のドライバーに、最適な速度を教えることで、渋滞を緩和し、通勤時間を短縮し、費用のかかる道路拡張プロジェクトの必要性を排除したソフトウェアだ。
英国政府は自動走行車が人々の命を救い生活を改善することを確信し、英国を自動走行車の規則をテストしそのための部品を製造するための世界的ハブとするための試行に、最近5000万ポンド以上を投資した。米国では、ミシガン大学が32エーカーの土地を、自動走行試験トラック専用に準備している。
TeslaのCEO Elon Muskは、「人々は車の運転を法律で禁止するかもしれない、なぜなら危険すぎるから」と公言して世界を驚かせた。20億台の時代遅れの車両が走る今、無人走行車への完全移行には20年近く必要だろう。
しかし、ワシントンDCのEno Center for Transportationによると、部分的な普及によっても、米国だけで年間2万1000人の命を救うことができる。われわれ全員、人間による運転を2030年までに禁止する努力をする必要がある ー 自分たちの命がかかっていると思って。さもなければ、2000万人の人々が不必要に亡くなっていく。
[原文へ]
(翻訳:Nob Takahashi / facebook)